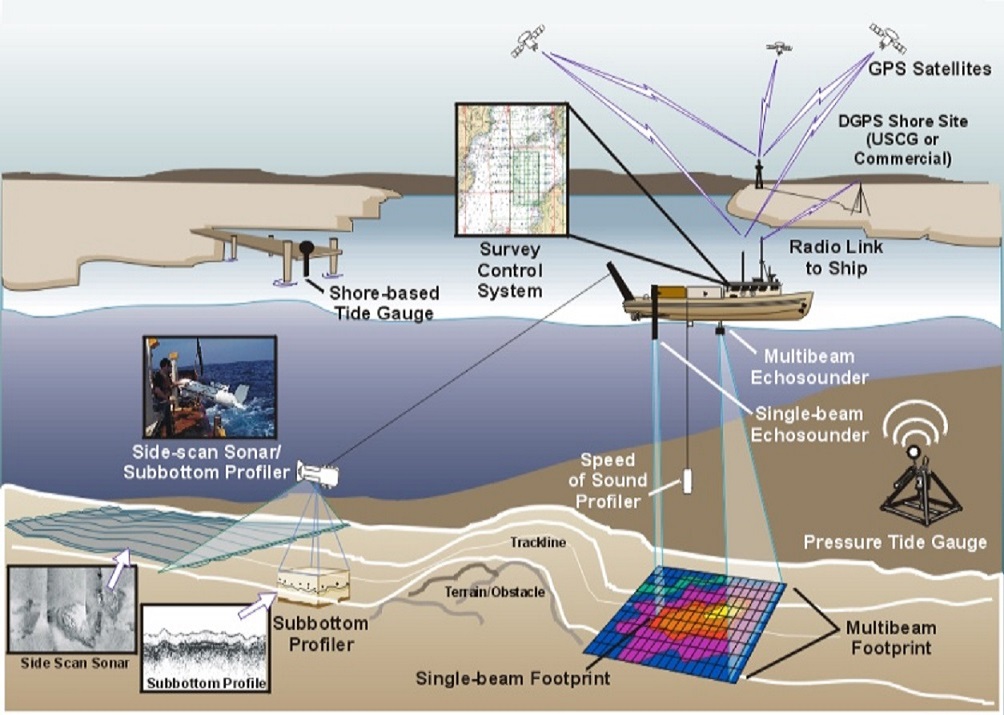
Geophysical survey for offshore pipeline utilizes a lot of equipment, in which, primarily following are used:
Knowing ones precise position out at sea and over water at every given instant is fundamental to the process of any Surveying as all other data are correlated with respect to this position to develop the over-all picture in terms of drawings, charts and maps. The more accurately one knows the position out in the survey field, more accurate is the final rendition of data. Positioning system provides the easting and northing (X, Y) coordinates of any location.
Global Positioning System (GPS):
The Global Positioning System (GPS) is the state-of-the-art technology in Navigation and Positioning. The GPS, originally, NAVSTAR (Navigation Satellite timing and Ranging) GPS is a satellite-based navigation, timing, and positioning system. GPS receiver calculates its position by precisely timing the signals received from the GPS satellites orbiting high above the Earth at orbital heights of 20,000 to 24,000 km. Each satellite continually transmits messages containing the time the message was sent, orbital information (the ephemeris), and the general system health and coarse orbital data of all GPS satellites. The receiver measures the transit time of each message and computes the distance from each satellite. A position thus obtained is called a GPS or Autonomous GPS position and is accurate to ± 7 meters to ± 12 meters due to various factors contributing to the errors in determining the precise distance between the Satellites and the receivers. This is excellent standards for normal vessel navigation but not quite adequate for precise work such as charting and mapping.
Differential Global Positioning System (DGPS):
Differential Global Positioning System (DGPS) is an enhancement to Global Positioning System that uses a network of fixed, ground-based reference stations to broadcast the difference between the positions indicated by the satellite systems and the known fixed position of the reference GPS receiver. These stations broadcast the difference between the measured satellite pseudo ranges and the theoretical pseudo ranges (internally computed using the knowledge of the position of the receiver with which it has been initialized and the position of individual satellites based on the almanac and ephemerides). Once received by mobile DGPS receiver stations they correct their pseudo ranges to individual satellites by the same amount as transmitted from reference station beacon there by enabling more accurate computation of the receiver position accurate to ± 1 meter to ± 3 meters. The DGPS antenna is installed on a high point of the vessel (generally the monkey deck or the mast), where there is no or minimal obstruction between the satellites and the Antenna.
Echo sounder is a system used for determining the distance between the survey vessel and seabed at any given instance. This data forms the basis for calculating seabed depth (Z co-ordinate) at any given location. Knowledge of the depth at which the seabed is at each position with reference to a vertical datum like the
chart datum is of paramount importance in developing the
seabed topographic picture. Echo-sounder is based on the principle that water is an excellent medium for the transmission of sound waves and that a sound pulse will bounce-off a reflecting layer like the seabed, returning to its source as an echo. The beam transmitted is a pencil cone shaped beam hence has the limitation of illuminating acoustically only some area of the seabed that fall in the footprint of the echo sounder.
The time interval between the initiation of a sound pulse and echo returned from the bottom can be used to determine the depth of the bottom using half of the two way travel time measured and using standard sound velocity in sea water which can range from 1480 m/s to 1560 m/s.
An echo-sounding system consists of a transmitter, transducer that converts electrical energy to sound and vice versa, a receiver that picks up the reflected echo and processes it, electronic timing and amplification equipment, and an indicator display which could be a paper hard copy type, digital type or both.
- Single Beam echo sounder (SBES) or Multi-beam echo sounder (MBES)
- Mounted on the side of the vessel or hull mounted
Side-scan sonar is used to produce a
morphological map of the area and create efficiently an image of large areas of the sea floor. The aim of conducting side scan sonar sweep is to obtain seabed information along the route e.g. anchor scours, large boulders, debris, bottom sediment changes, pockmarks and any item on the seabed having a horizontal dimension more than 0.5 m. General requirements for resolution of sonar imagery is to detect objects on the seabed within
±0.5 m along-track and ±1.0 m across-track.
Side scan sonar uses a sonar device that emits a fan-shaped pulse down toward the seafloor across a wide angle perpendicular to the path of the sensor through the water, which may be towed from a surface vessel or submarine, or mounted on the ship's hull. The intensity of the acoustic reflections from the seafloor of this fan-shaped beam is recorded in a series of cross-track slices. When stitched together along the direction of motion, these slices form an image of the seabed within the swath (coverage width) of the beam. The sound frequencies used in side-scan sonar usually range from 100 to 500 kHz; higher frequencies yield better resolution but less range.
The Side Scan Sonar shall be operated on a suitable range setting to achieve a minimum of 110% to 133% overlap of adjacent lines. The survey line spacing shall be adjusted based on water depths in order to achieve this. The
MBES line-spacing is designed as far as practically possible to achieve the required coverage on the side scan sonar (SSS), when running SSS with
MBES on a single pass.
Sub-bottom profiling systems are used to identify and characterize layers of sediment or rock under the seabed and investigate the sub-seabed
stratigraphy and degree of homogeneity of the
subsoil. The data obtained using this system provides information on these sub-floor sediment layers.
Sub-bottom profiling systems utilize the principle of seismic reflection and refraction. Seismic reflection uses a stronger sound signal than echo location and lower sound frequencies. Sub bottom profiler has two parts –
- Sound Source i.e. the High Voltage Capacitor Banks connected to the Sparker or Squid which is towed behind the vessel and transmits the acoustic signal generated by the bursting bubble in water created by arcing of very high voltage sparks between the broom elements, hence the name Sparker.
- Hydrophone, which is also towed separately behind the vessel and receives the reflected acoustic signal. The data from the hydrophones directly gets connected to the Geophysical data logging system.
Different frequencies of the sound pulses are reflected from the different sub-bottom layers of the seabed. Hydrophones detects and receives the reflected sound signal when it reaches the surface. The time taken by the sound to return to the ship is used to find the thickness of the layers of the sub-seabed and their orientation such as level or sloping. This enables us to visualize and stratify the sub-seabed layers into various discernable
isopach. Once confirmed by random ground truth samples of seabed cores, it provides a rapid means of covering the entire survey area for details seabed
stratigraphy.
SBP system operates within the 3.5 - 7 kHz range with a pulse width selectable between 0.15 and 0.5ms. The system shall be capable of transmitting at repetition rates of up to 10 Hz and be capable of penetrating and providing sub-bottom strata for a depth of at least
8m to 10m below the seabed in any soil condition.
The aim of deploying a magnetometer is to detect and measure variations in the total magnetic field of the underlying seafloor. The magnetometer is used for the detection and mapping of all sizes of ferrous objects on the seabed. This includes anchors, chains, cables, pipelines, ballast stone and other scattered shipwreck debris, munitions of all sizes, aircraft, engines and any other object with magnetic expression which could be potentially hazardous to pipelines or umbilicals and for the placement of rigs & barges.
The magnetometer is a magnet sensitive device that detects all sizes of ferrous objects on the sea floor across a wide angle perpendicular to the path of the sensor through the water, which is towed as close to the seabed as possible. Based on the variation in the earth’s magnetic field the object induces to appear as an anomaly.
The magnetometer is towed from the aft of the vessel. The magnetometer is interfaced with the vessel
positioning system for fix annotation, throughout the survey. The magnetometer is equipped with either an altimeter or
depth meter to ensure proper tow depth.
Motion Sensor or the Attitude Sensor is used to measure linear and angular motions of the survey vessel’s, due to the waves in the sea. The angular motions are measured using the rate gyros and the linear motions are measured using the accelerometers installed in the sensor. With the help of these accelerometers, rate gyros and a complex algorithm, the sensor computes and output the heave, roll, pitch and yaw motion of the vessel. These data sets are then fed to the depth sensors (
Single beam echo sounder) for compensating the depth observed by the
Echo sounders.
Multibeam Echo sounder data is compensated for heave, roll, pitch and yaw motion of the vessel while the
single beam Echo sounder data is compensated only for heave motion of the vessel.
Pipe liner is similar to the
Sub-bottom Profiler except that the projected beam’s frequency band width is much less thus giving the required resolution to detect submerged pipelines buried in the seabed and to track & trace them in order to develop the existing pipeline profile. This objective can also be achieved by a high resolution
Sub-bottom Profiler also.
Pipeline profiling systems also utilizes the principle of seismic reflection and refraction. Seismic reflection uses a stronger sound signal than echo location and lower sound frequencies. The sound pulse travels down to the seafloor. Some of the sound waves reflects-off the seafloor and some of them penetrates the seafloor. The sound waves that manages to penetrate the seafloor reflects-off the hard material of the pipeline in comparison to the softer surrounding seabed enabling clear demarcation and identification of buried pipelines. The reflected sound waves travels back to the surface, is picked up by the transducers, which processes the signals to develop the complete picture with their orientation such as indicating the burial depth of the pipeline along the route w.r.t seabed including the locations where the pipelines is exposed i.e. laid on the seabed.
Pipe liner subsea unit is either a towed body or an over the side mount. It is also possible to have a hull mounted configuration also. The subsea unit is connected to top side unit using the transducer cable. The top side unit is further connected to the geophysical data logging system either using dedicated ports such as BNC or Ethernet. The position, date, time and fix number are output from the navigation PC on one of the available RS232 serial data port to the geophysical data logger. This data gets annotated on to the Pipe liner data.
It works on the principle of a magnetic compass by aligning itself with the earth’s magnetic field. The primary sensor of the device is a electronic fluxgate magnetic device that creates its magnetic field on being provided the power supply. This magnetic field then is designed to line up with earth’s magnetic field and point to the magnetic north. Internally designed compensation cater for magnetic deviation and variation to eventually point the compass to the true north.
The periodic rise and fall of sea level causes the depth to vary from time to time. This has been addressed by referring the height of rise and fall referred to a
vertical datum below which the falling sea level seldom falls. This vertical datum is referred to as
chart datum and all
bathymetric data are referred to this
chart datum. To refer observed depth to the
chart datum one has to remove the height of sea level above the
chart datum at the time the depth was observed. This height of the sea level is known as the height of tide. Hence in order to reduce all observed depths to
chart datum one must know the height of tide at all times the
bathymetric survey has been carried out. It is to collect this tidal data that one uses the tide gauge / tide pole.
The Jetty level is well established above
Chart Datum. A tide pole setup on this jetty by virtue of its coincidence with the jetty level determines the zero of the tide pole with respect to the chart datum. Thereafter all water levels observed on this tide pole are reduced to the height of tide by adding or subtracting the difference between the chart datum and the zero of the tide pole depending on whether the zero of the tide pole was above or below the chart datum respectively.